Prérequis
Matériels
- Une tablette ou un PC sous windows 10 ou Linux
- Une antenne GNSS bi-fréquence
- Un récepteur F9P
Logiciels
- La dernière version du logiciel RTKlib version Rtkexplorer demo5 > Calcul du positionnement en RTK par RTKlib pour une géolocalisation centimétrique.
Connexion et paramétrage
Branchement de l’antenne GNSS
-
Brancher l’antenne + récepteur F9P en USB
-
Ouvrir ensuite le gestionnaire de périphériques et vérifier le port COM créé sous Windows ou le point de montage /dev/ttyXXX pour Linux
RTKLIB
RTKLIB permet de convertir le Signal de positionnement de l’antenne GNSS grâce à une correction RTCM3 (Réseau Centipede par exemple) en un signal de géolocalisation précise au centimètre si les conditions le permettent.
- Télécharger la dernière version de RTKlib version Rtkexplorer demo5
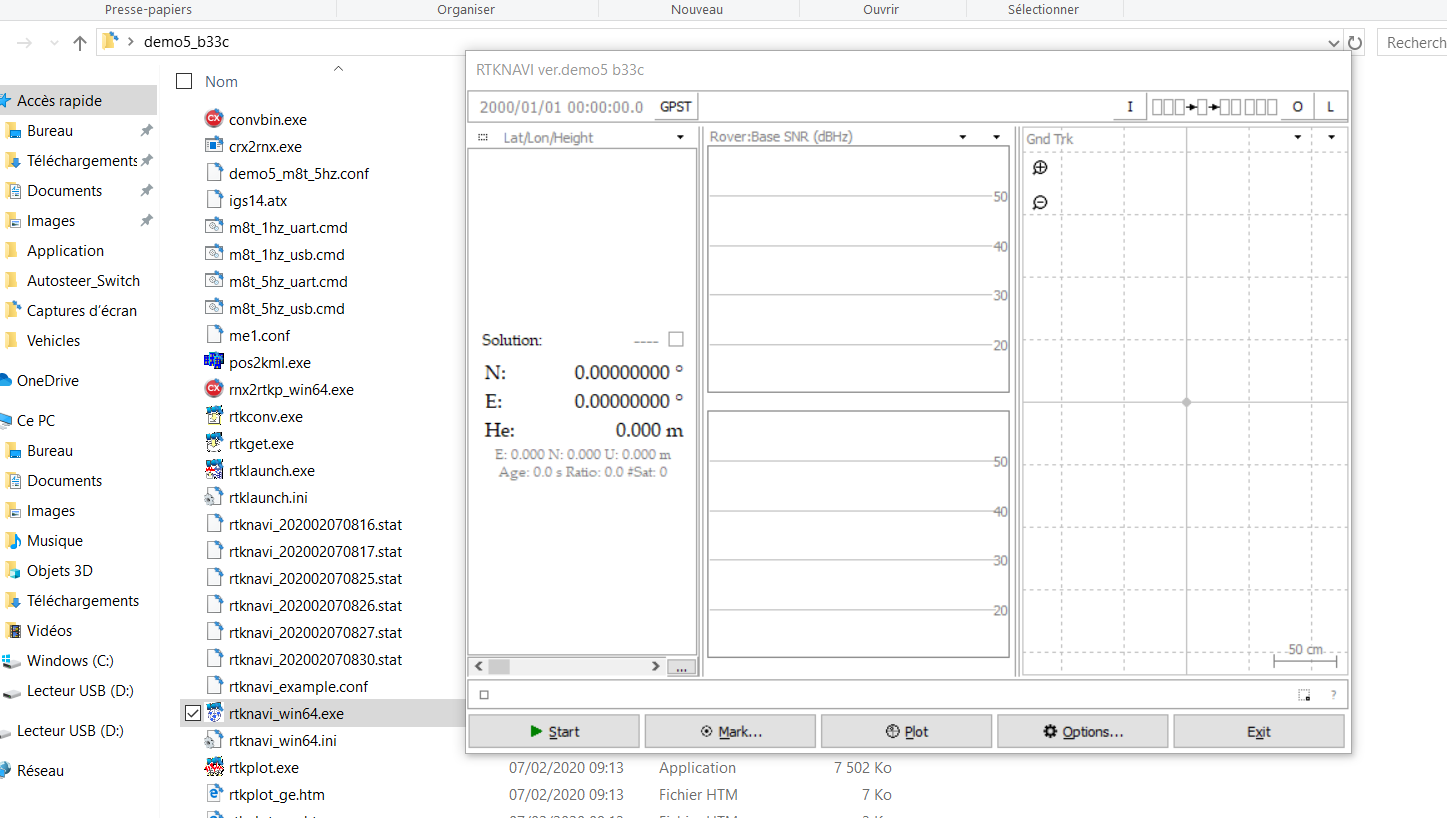
- le décompresser dans le dossier de son choix.
- Ouvrir RTKNavi
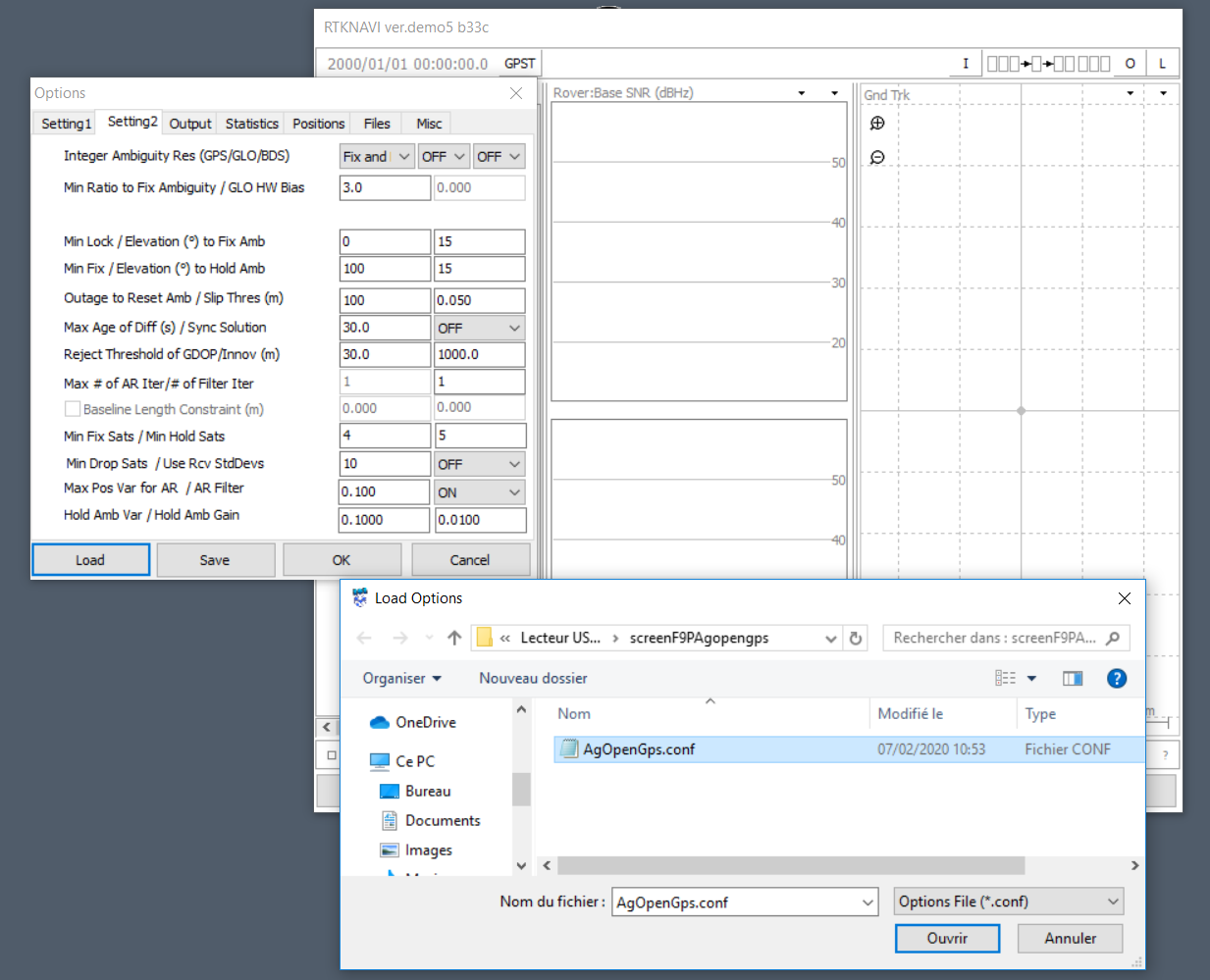
- Télécharger ce fichier de paramétrage
- cliquer sur option …
- Cick sur LOAD et choisir le dernier fichier téléchargé et OK
Permet de paramétrer automatiquement certains paramètres de RTkLIb
- Cliquer sur le I en haut à droite
- cliquer sur ROVER > Opt
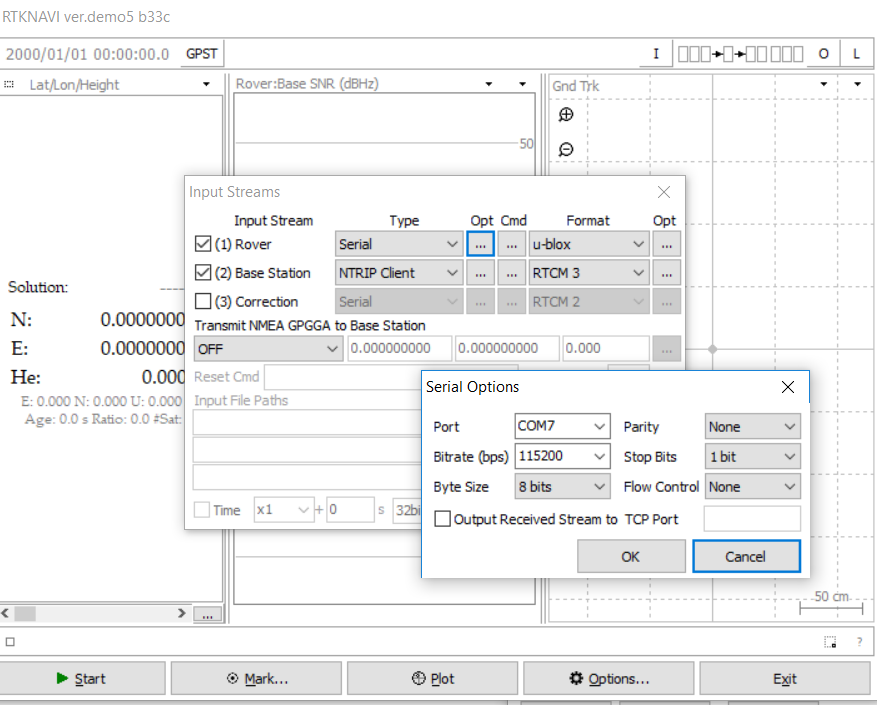
- Modifier si besoin le Port COM7 (Entrée USB de l’antenne GNSS) en fonction de votre paramétrage.
- Télécharger ce fichier de paramétrage
- cliquer sur ROVER > Cmd
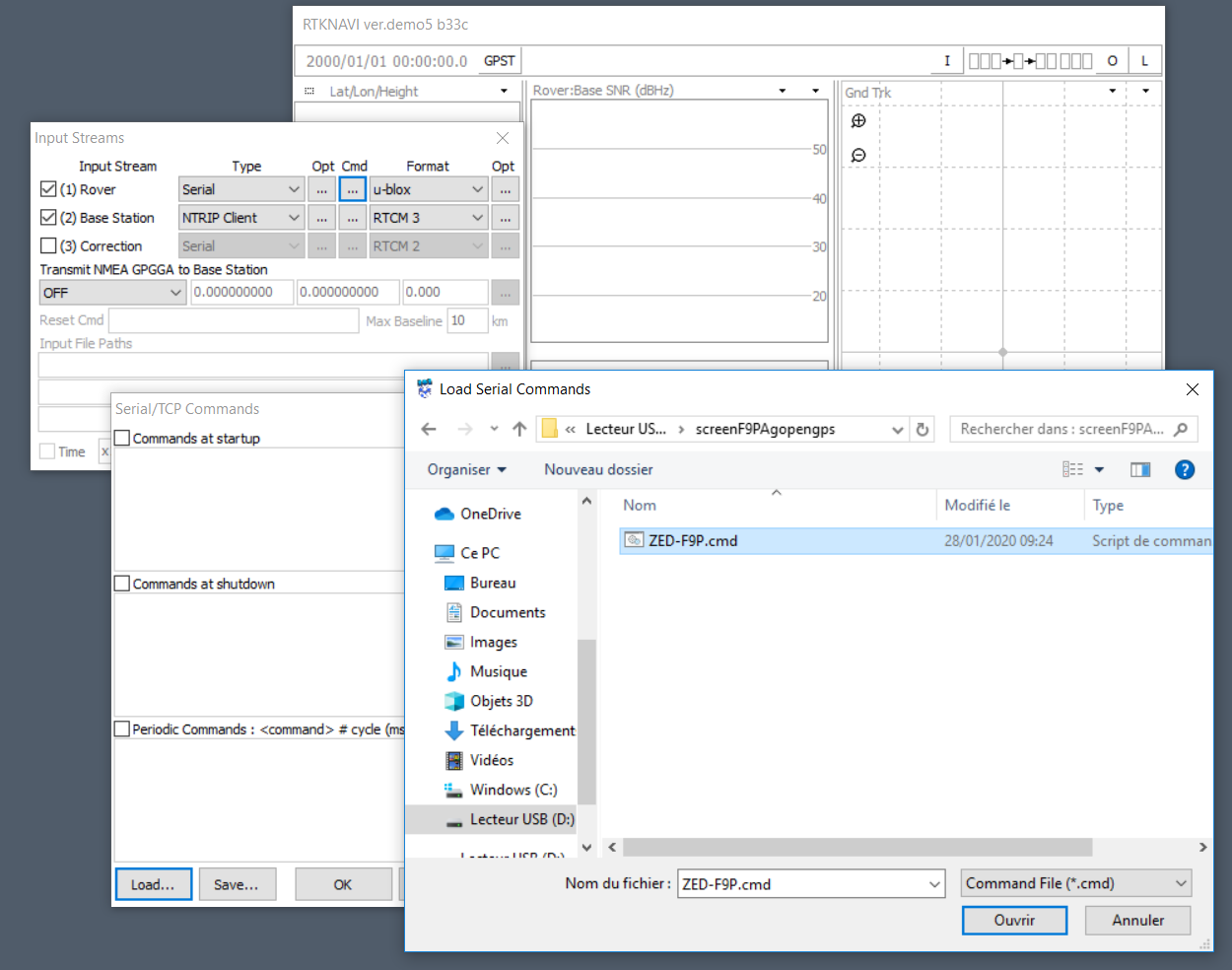
- Cliquer sur LOAD et choisir le dernier fichier téléchargé
- Cocher Commands at startup
Permet de charger des paramètres injectés au module F9P à chaque démarrage
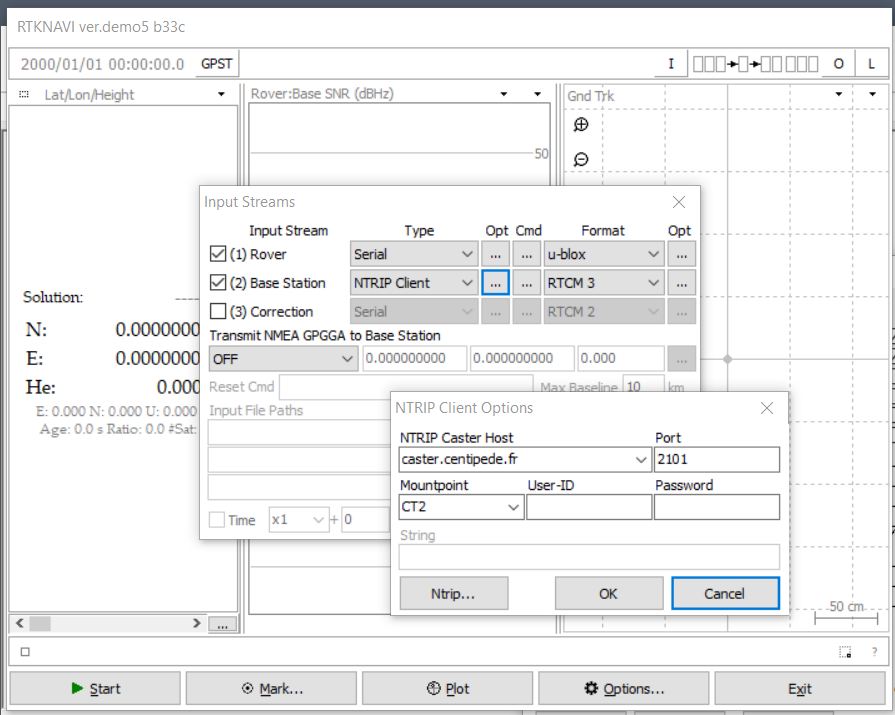
- Cliquer sur Base Station > Opt
- Modifier le Mountpoint sur la base Centipede la plus proche de vous.
Si vous n’êtes pas couverts par une Base CentipedeRTK vous pouvez en fabriquer une ici.
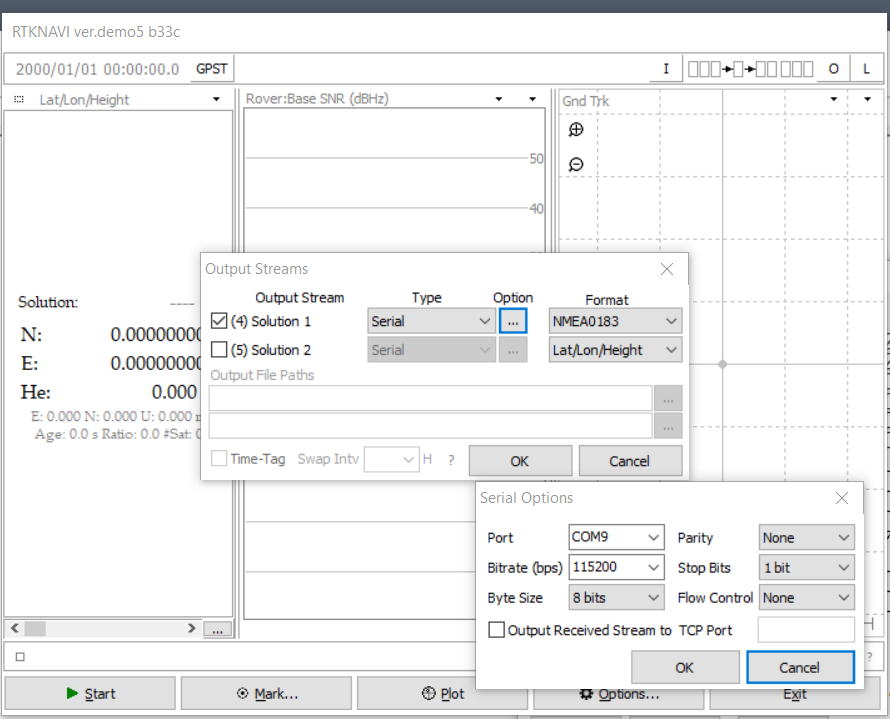
- Cliquer sur le O en haut à droite
- cliquer sur Solution > Option
- Modifier si besoin le Port COM9 (Sortie NMEA de RTKlib) en fonction de votre paramétrage.
- Faire EXIT et ré-ouvrir RTKNavi pour l’enregistrement des paramètres.
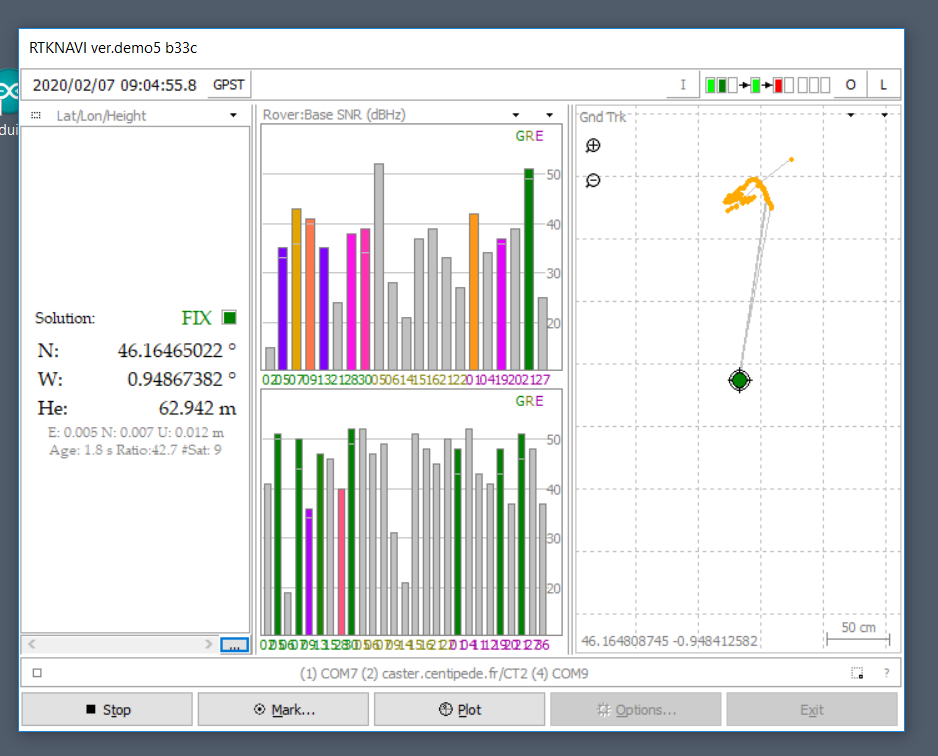
Premier démarrage
- Cliquer sur Start et attendre (de 30s à plusieurs minutes) une position FIX RTK
L’antenne de réception doit bien sûr être en extérieur dans un milieu dégagé